Notion de mobilités
I/ Généralité sur les différents types de mouvements
-Mouvement de translation : portables, porte coulissante, tiroir,…
-Mouvement de rotation : porte classique, …
-Mouvement de translation circulaire : cabine d’une grande roue,…
-Mouvement quelconque : hélicoptère,…
II/ Mobilité d’un solide
Soit un solide S1 en mouvement par rapport à un repère R0 servant de référence. On associe à S1 le repère R1et au solide S0 le repère R0.
Examinons ensemble des possibilités de mouvements de S1 par rapport à Ro :
-Remarquons que tout les mouvements complexe se décompose en translations et rotations,
-Toutes translations peut se décomposer au plus en 3 translations suivant les axes d’un trièdre,
-Toutes rotations peut se décomposer au plus en 3 rotations suivant les axes d’un trièdre.
On dit qu’un solide possède 6 mouvements possibles (6ddl), 3 translations et 3 rotations suivant les axes d’un trièdre.
III/ Notion de mouvements
1. Introduction
Une liaison est le modèle d’une solution technique qui établit une relation de contact entre deux pièces.
2. Hypothèses simplificatrices
Les pièces sont considérés comme des solides indéformables et géométriquement parfaits. Entre les surfaces de contact, on considère qu’il n’y a pas de frottements, ni de jeu.
3. Notion de degré de liberté
Pour identifier les mouvements possibles d’un solide par rapport à un autre, il est nécessaire de mettre en place un repère. Les repères utilisés en mécanique sont des repères orthonormés directs.
(direct : x=> y => z, indirect : x => z => y)
Sur chacun des trois axes (O ;x), (O ;y), (O ;z), il y a deux types de mouvement possible : une translation et/ou une rotation.
Définition : On appel degré de liberté ou de mobilité (on peu écrire ou dire ddl) la liberté de mouvement en rotation ou en translation d’un solide par rapport à l’autre solide.
Nombre maxi de ddl : 6
A l’inverse, on appel degré de liaison l’impossibilité de mouvement en rotation ou en translation d’un solide par rapport à un autre.
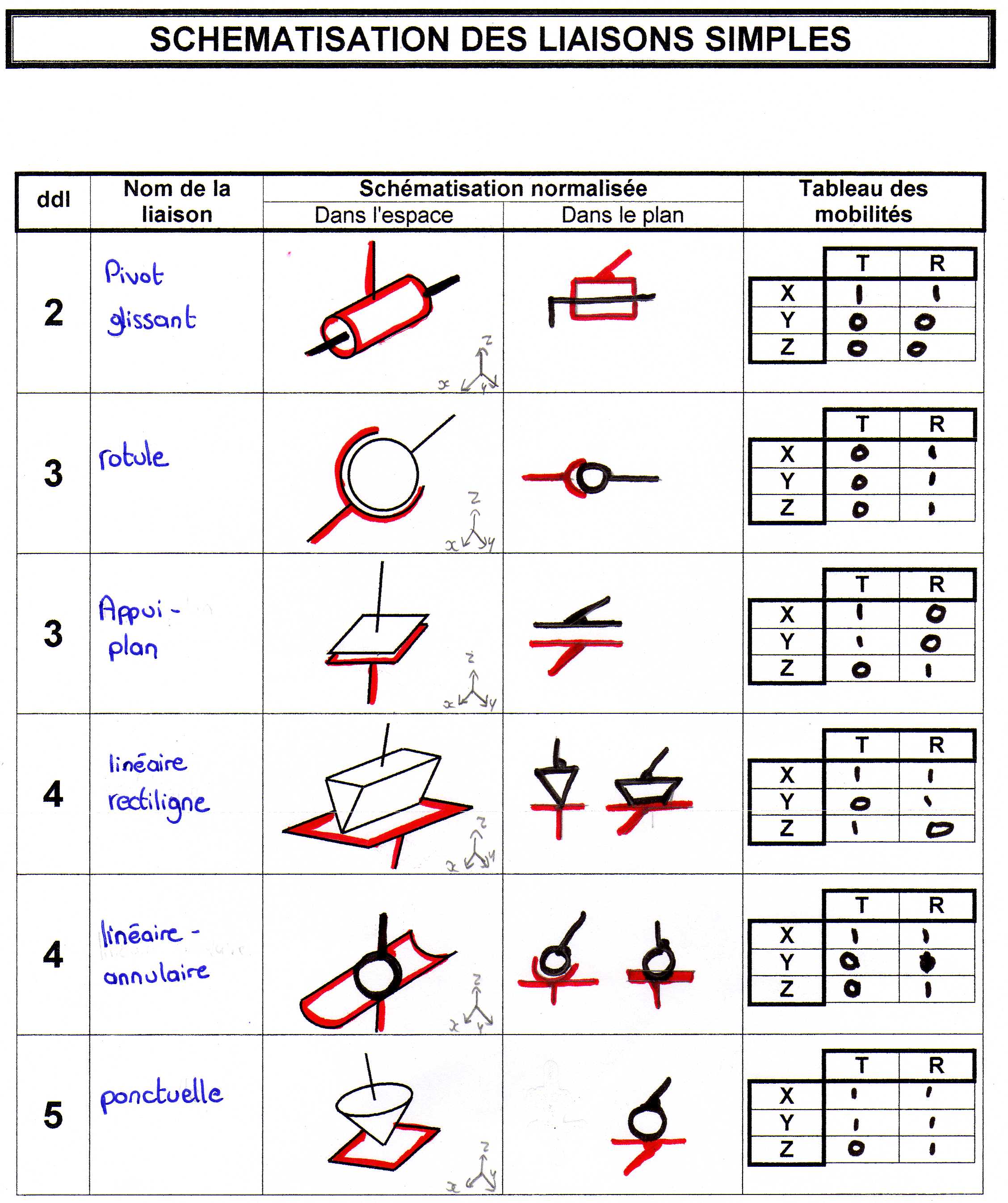
4. Liaisons élémentaires ou liaisons simples
Définition : Une liaison simple entre deux solide S1 et S2 est obtenue de la manière suivante :
1 surface élémentaire de S1 => contact <= 1 surface élémentaire de S2.
Les surfaces élémentaires obtenu à partir des principaux procédés d’usinages sont :
-Surface sphérique,
-Surface plane,
-Surface cylindrique.
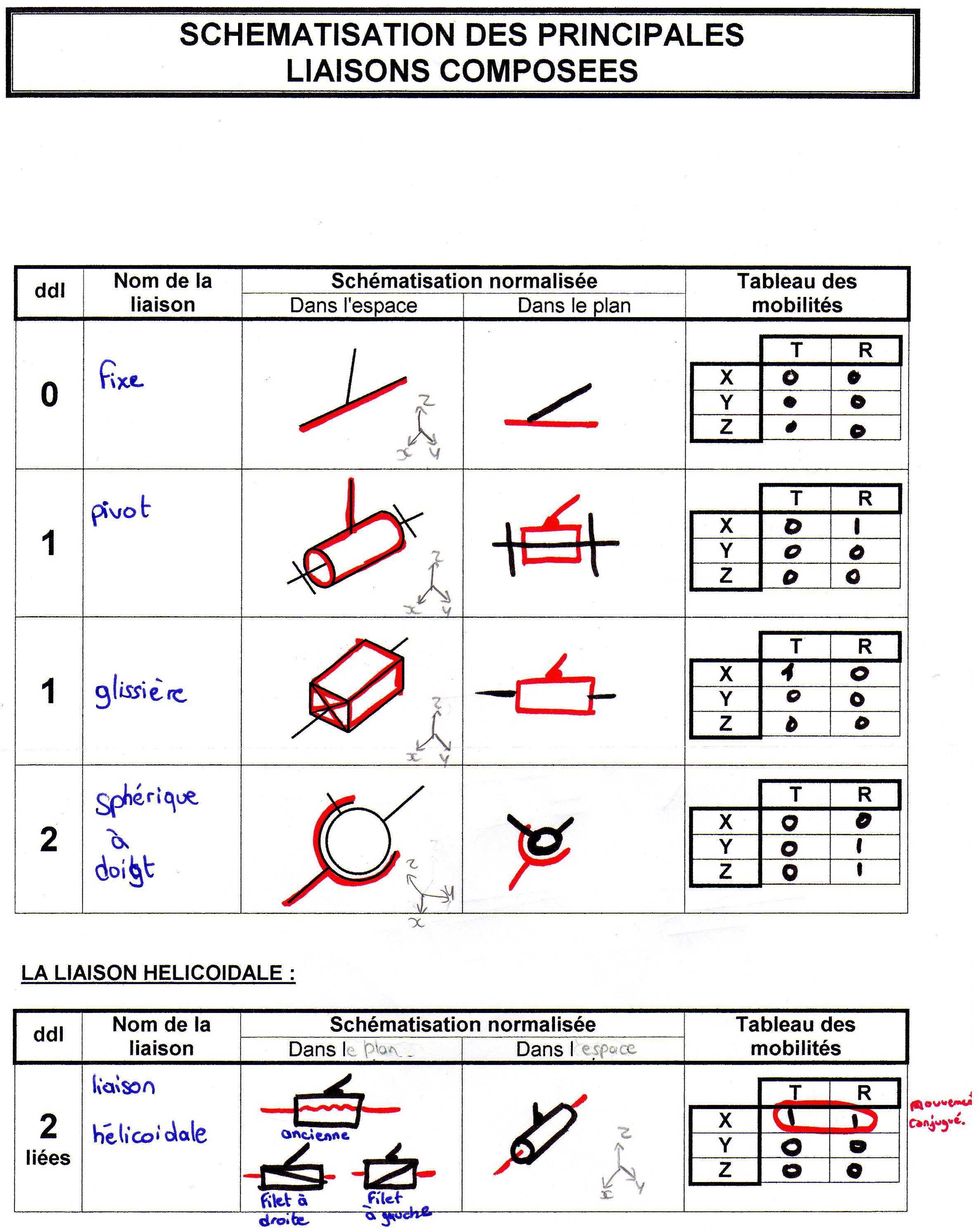
5. Liaisons composées
Nous constatons que les ddl des liaisons simples sont au moins égaux à 2. Or les liaisons mécaniques à 1 ddl sont couramment utilisé (les liaisons pivot et glissière en robotique). Ces liaisons ne peuvent pas être réalisé par la combinaisons de deux surfaces élémentaires, on parle alors de liaisons composées.
Définition : Une liaison composé entre deux solides S1 et S2 est obtenus de la manière suivante :
Au moins 2 surfaces élémentaire de S1 => contact <= Au moins 2 surfaces élémentaire de S2.
Remarque : On peut donc dire qu’une liaison composée est obtenue par l’association cohérente de 2 ou plusieurs liaisons simples
Le 02/07/08 by Xababaaâ